Lab1: Pruning(剪枝)¶
删掉不重要的权重,让模型更小更快。核心问题:删什么、怎么判断重要性、删完怎么恢复精度。
一、两种剪枝方式¶
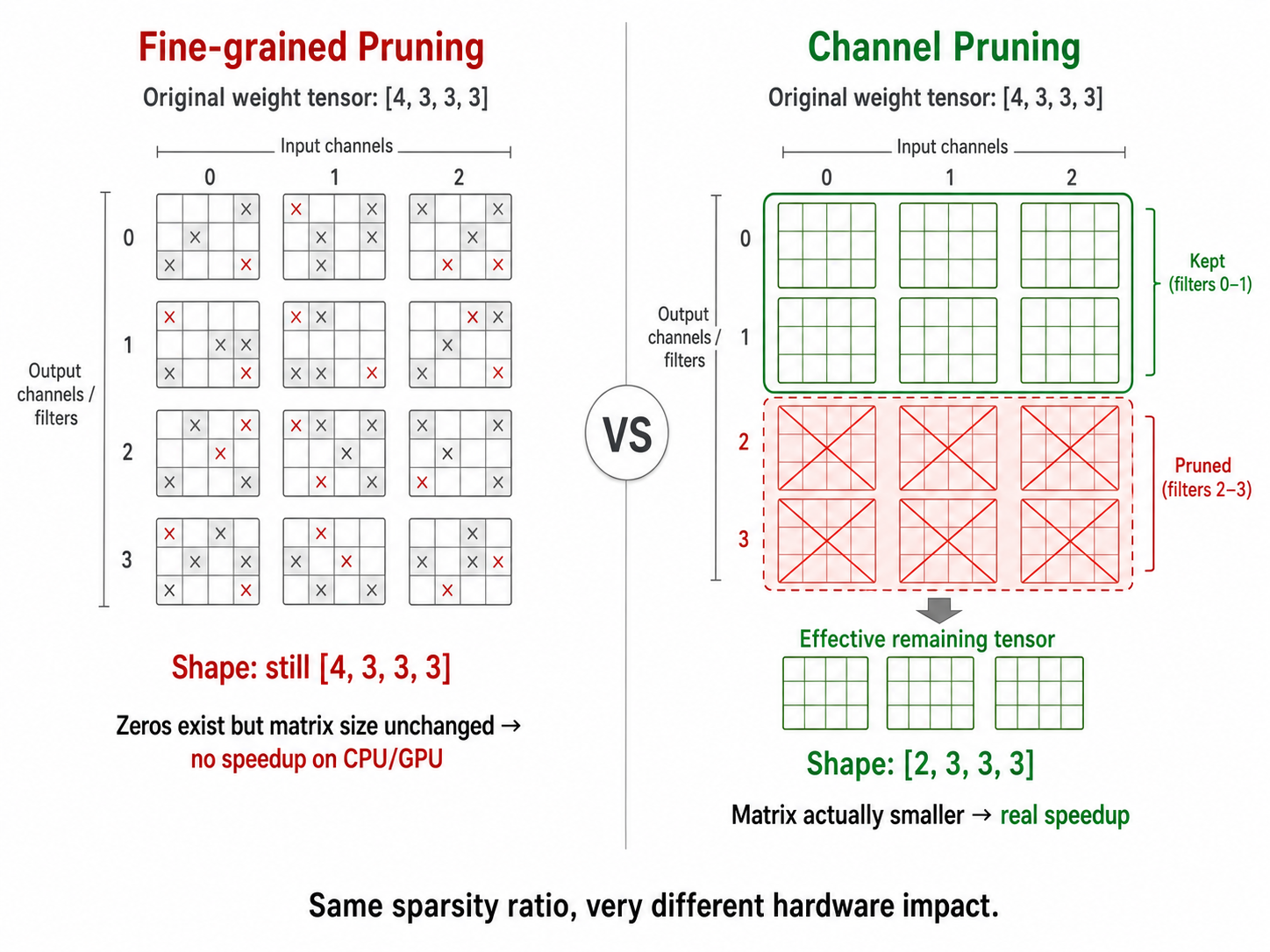
| Fine-grained(Unstructured) | Channel(Structured) | |
|---|---|---|
| 剪的单位 | 单个权重 | 整个 filter |
| 模型形状 | 不变 | 真正变小 |
| 实际加速 | 无(需稀疏硬件) | 有 |
| 精度恢复 | 容易 | 较难 |
Fine-grained 形状不变,普通硬件仍需计算所有乘法(包括乘以 0),无法加速。Channel pruning 让矩阵真正变小,直接快。
二、Fine-grained Pruning¶
Sparsity(稀疏度):零元素占比。sparsity = 0.9 表示 90% 的权重为 0。
\[\text{sparsity} = \frac{\#\text{zeros}}{\#\text{total elements}}\]
Magnitude-based Pruning:以权重绝对值衡量重要性,绝对值越小越优先剪掉。找到第 num_zeros 小的值作为阈值,低于阈值的置零,生成 Binary Mask:
\[\text{importance} = |W|\]
num_zeros = round(num_elements * sparsity)
threshold = torch.kthvalue(tensor.abs().view(-1), num_zeros).values
mask = tensor.abs() > threshold
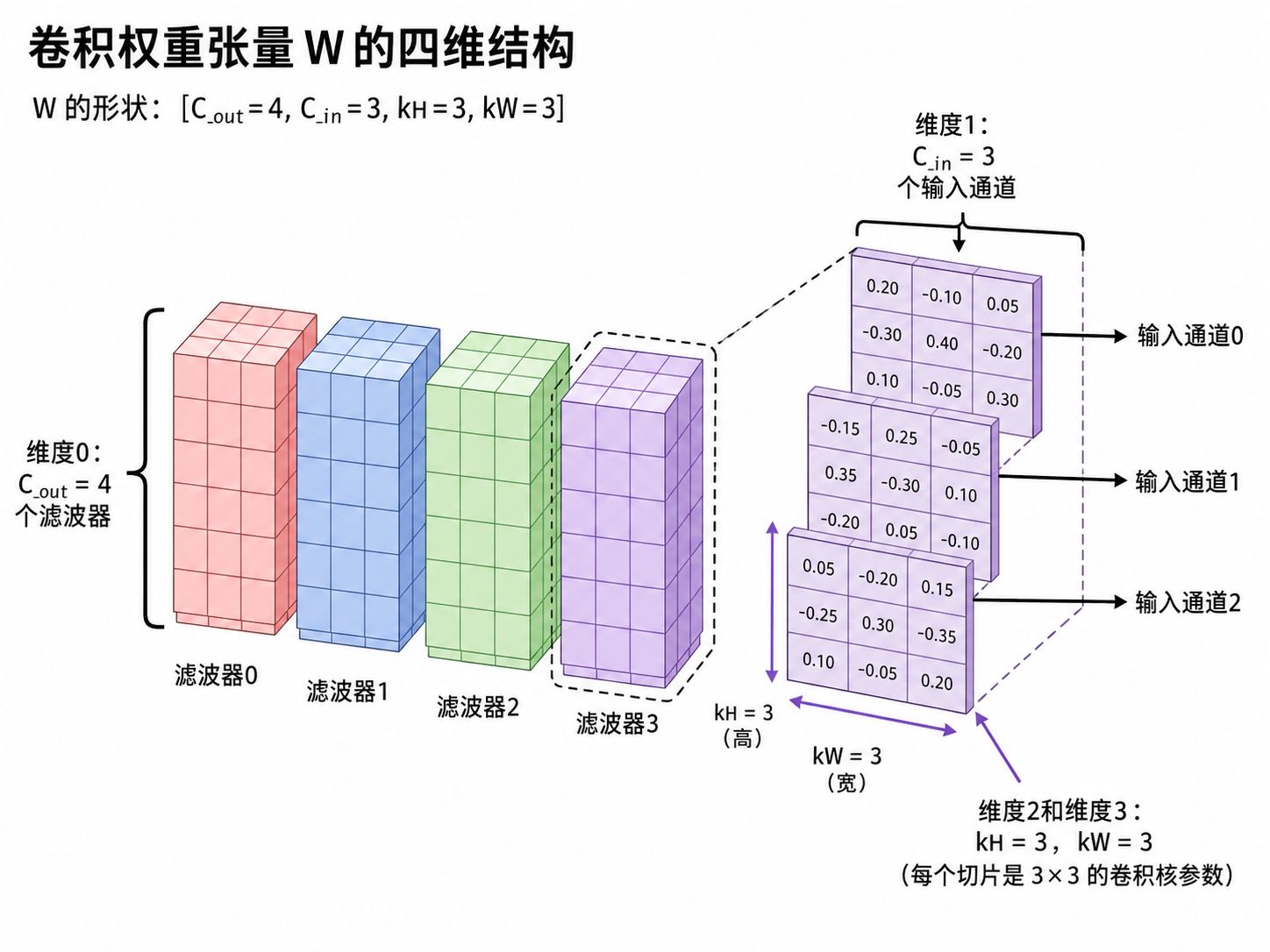
三、卷积层权重结构¶
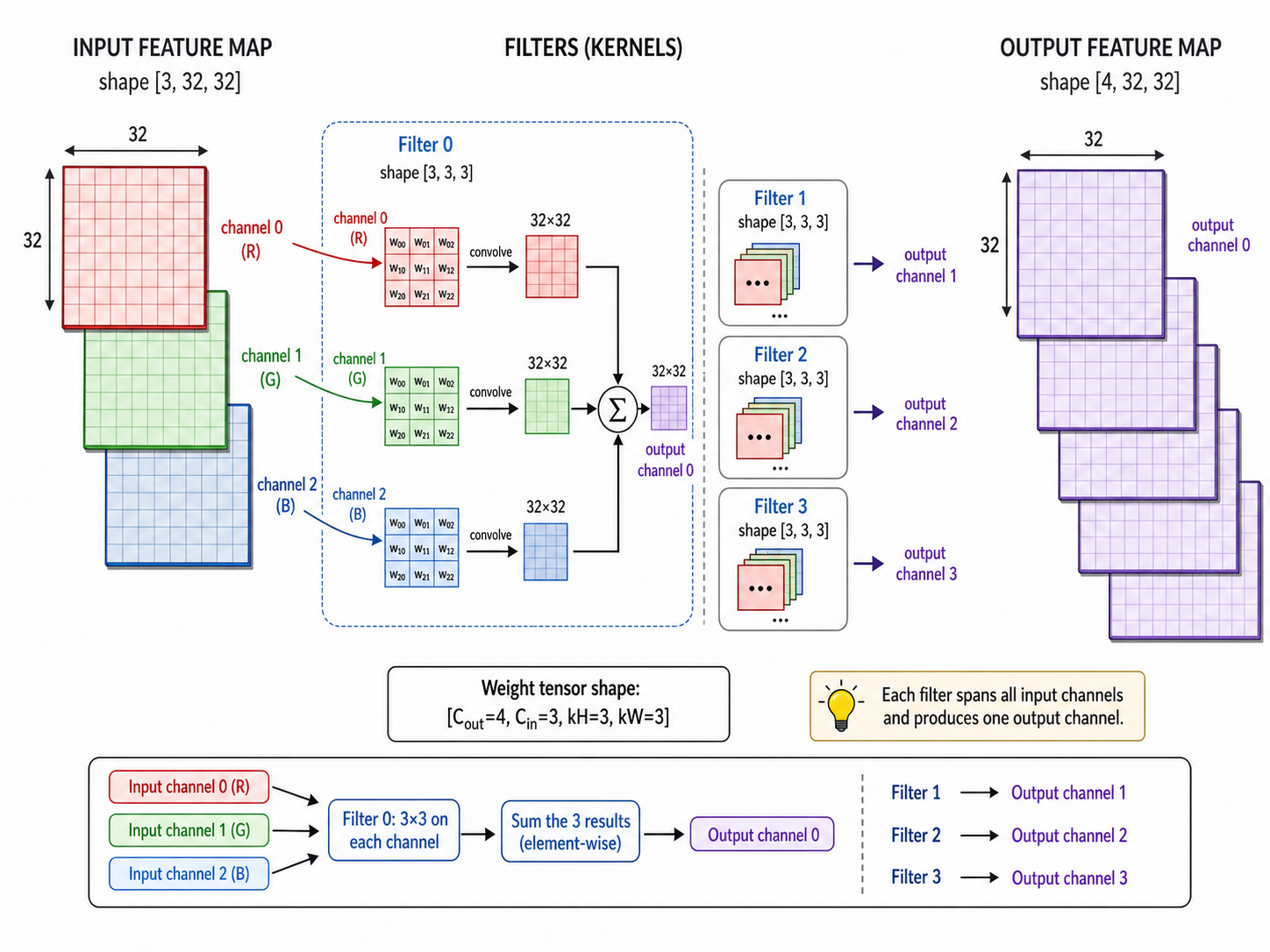
\[W \in \mathbb{R}^{C_{out} \times C_{in} \times k_H \times k_W}\]
- dim 0 \(C_{out}\):filter 数量(输出 channel 数)
- dim 1 \(C_{in}\):每个 filter 的输入 channel 数
- dim 2, 3 \(k_H, k_W\):卷积核尺寸
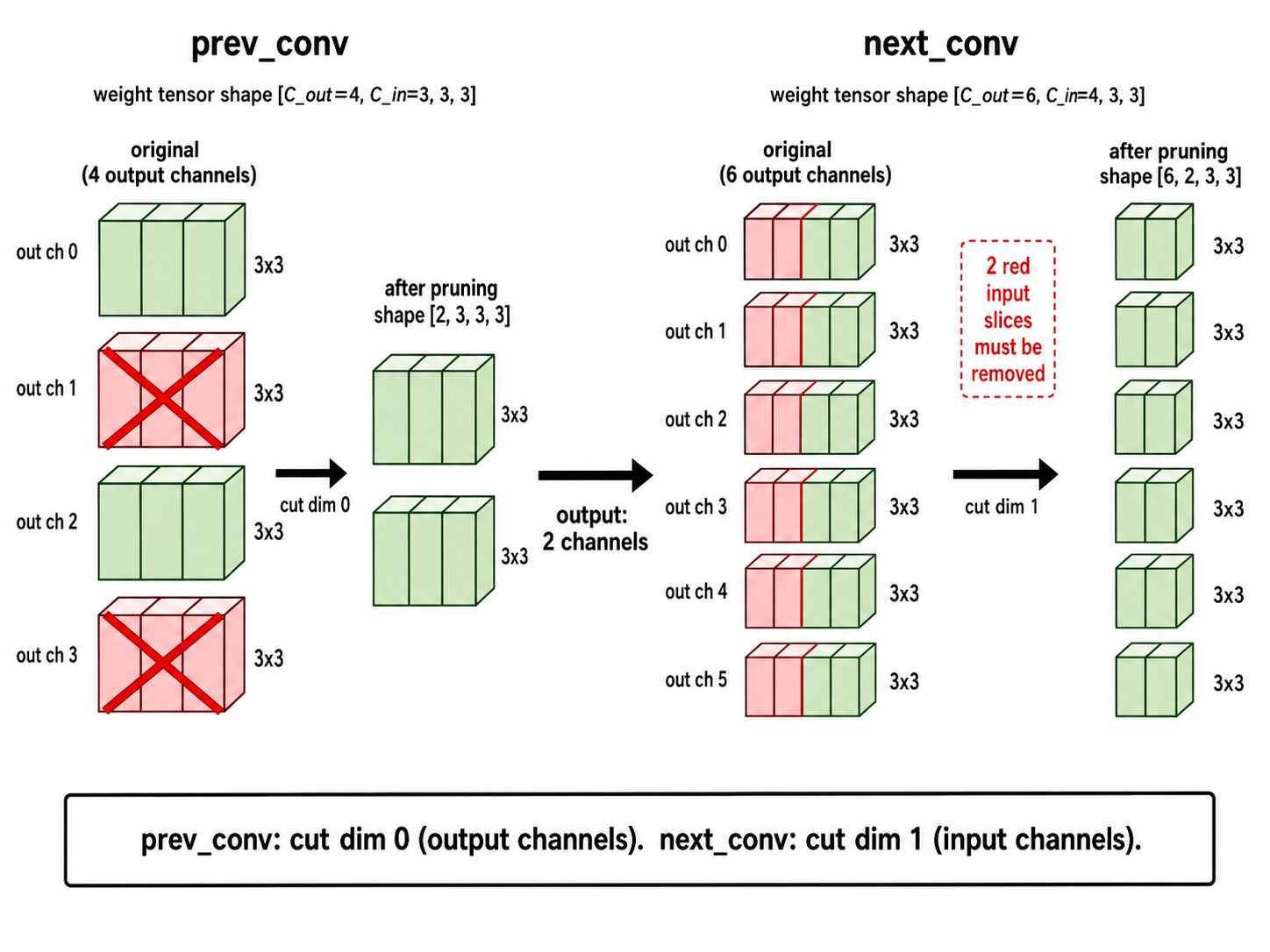
四、Channel Pruning¶
维度联动规则:谁的 channel 数变了,就切对应维度。
- prev_conv 输出减少 → 切 dim 0:
W[:n_keep] - next_conv 输入必须与之对齐 → 切 dim 1:
W[:, :n_keep]
filter 的 C_in 不是自由的,上一层输出几个 channel,这一层每个 filter 就必须有几个输入切片,否则 PyTorch 报 shape mismatch。
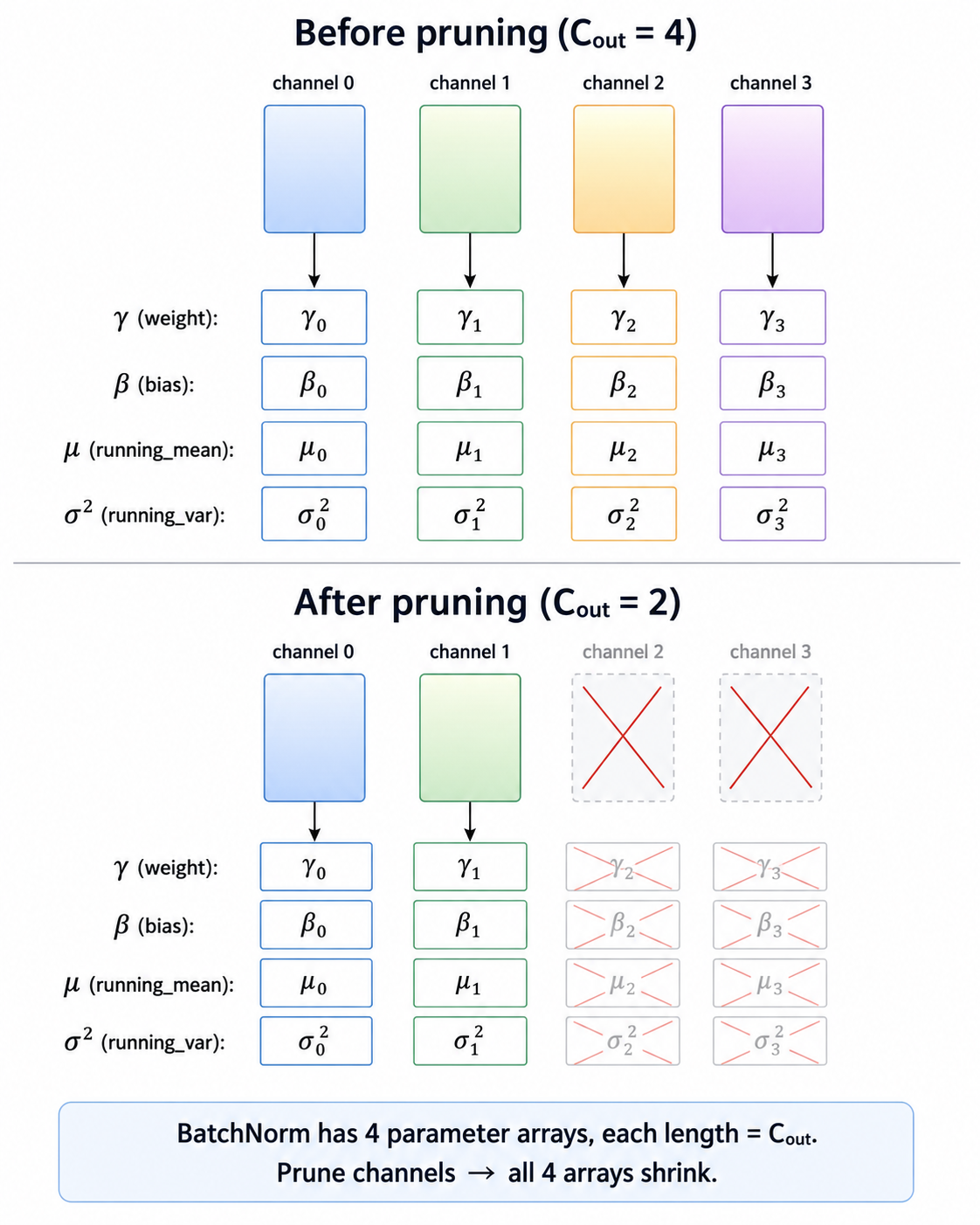
BatchNorm 联动:BN 的 4 个参数(γ, β, μ, σ²)长度均等于 C_out,prev_conv 的 channel 数变了,后面的 BN 必须同步缩减,共 5 行修改。next_conv 只改了输入,输出不变,其后的 BN 无需修改。
计算量:删掉 30% channel,两侧同时缩减:
\[0.7C_{out} \times 0.7C_{in} = 0.49 \text{ 原来}\]
理论减少 50%,实际延迟降幅更小(kernel 启动、内存对齐等固定开销不随 channel 数缩减)。
五、Sensitivity Scan & Finetuning¶
Sensitivity Scan:逐层单独剪枝,测不同 sparsity 下的 accuracy 变化,找出各层敏感程度。敏感层给低 sparsity,不敏感层给高 sparsity。靠近输入的层通常最敏感。
Finetuning:剪枝后继续训练恢复精度。每次梯度更新后必须重新应用 mask,防止被剪权重"复活":
def apply(self, model):
for name, param in model.named_parameters():
if name in self.masks:
param.data *= self.masks[name]
PyTorch API 速查¶
torch.kthvalue(tensor, k).values # 第 k 小的值
tensor.abs() # 绝对值
torch.index_select(tensor, dim, index) # 按 index 重排某维度
torch.argsort(importance, descending=True) # 按重要性排序,返回下标
tensor.detach() # 取消梯度追踪
tensor.set_(new_tensor) # 原地替换内容
tensor.copy_(new_tensor) # 原地复制内容
# 卷积层权重:[C_out, C_in, kH, kW]
# BN 参数:weight(γ), bias(β), running_mean(μ), running_var(σ²),长度均为 C_out